|
根据运行的环境,操作系统可以分为桌面操作系统,手机操作系统,服务器操作系统,嵌入式操作系统等。
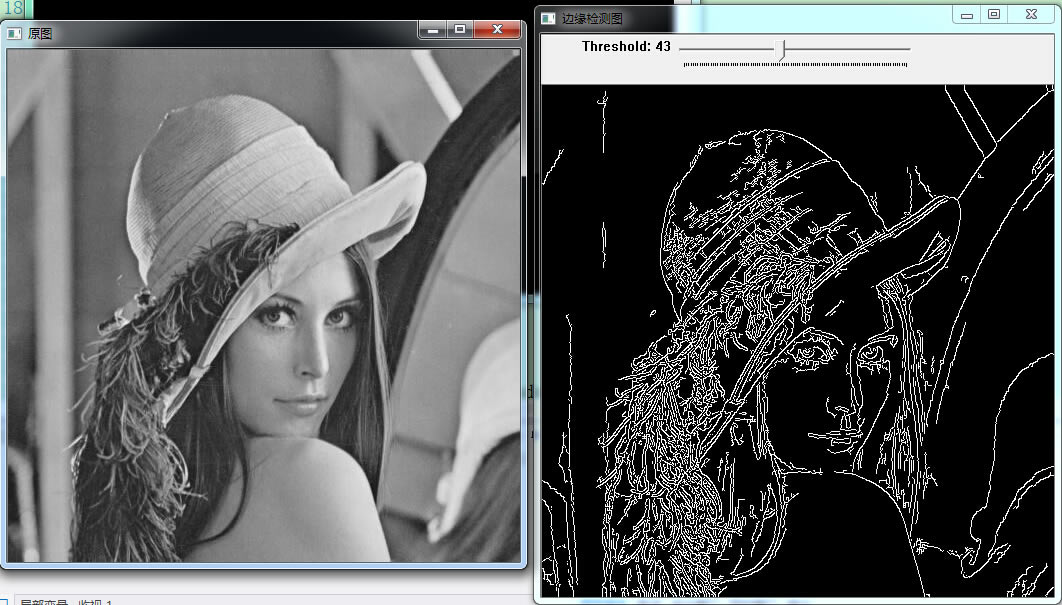
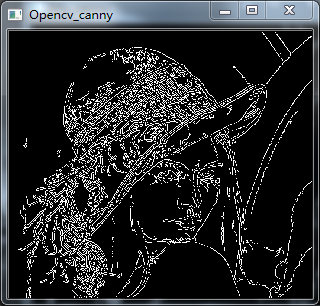
在: 中,我们主要讨论使用sobel算子和Laplace变换进行边缘检测. 其中,主要使用对梯度大小进行阈值化以获得二值边缘图像的方法. 在图像中,边缘通常包含重要的视觉信息,因为它们勾勒出图像元素的轮廓. 但是,仅使用简单的二进制边缘图像有两个主要缺点: 使用此方法检测到的边缘太厚,这意味着很难准确定位对象. 很难找到这样的阈值,该阈值可以检测所有足够低的重要边缘,并且同时不包含太多次的边缘. 这两个问题正是本节中使用的Canny算法试图解决的问题.
Canny运算符通常基于sobel运算符(尽管也可以使用其他梯度运算符),其核心思想是使用两个不同的阈值来确定哪些点属于轮廓,以便将两个阈值分别划分获得两个边缘贴图. 此后,Canny算法将两个边缘贴图组合在一起以生成“最佳”轮廓图. 如果存在连续的边缘点,则将低阈值图像中的边缘点与高阈值图像中的边缘相连,然后保留低阈值图像中的边缘点. 这种使用双阈值获取二进制图像的策略称为磁滞阈值. Canny算法对选择两个阈值有一定要求. 对于较低的阈值,它应包括被认为属于明显图像轮廓的所有边缘像素. 较高阈值的作用应该是定义属于所有重要轮廓的边缘,并且应排除所有异常值. 在OpenCV中,实现Canny算法的函数是cv :: Canny. 该函数的调用方法如下:
主要代码如下,直接将其添加到主要功能中
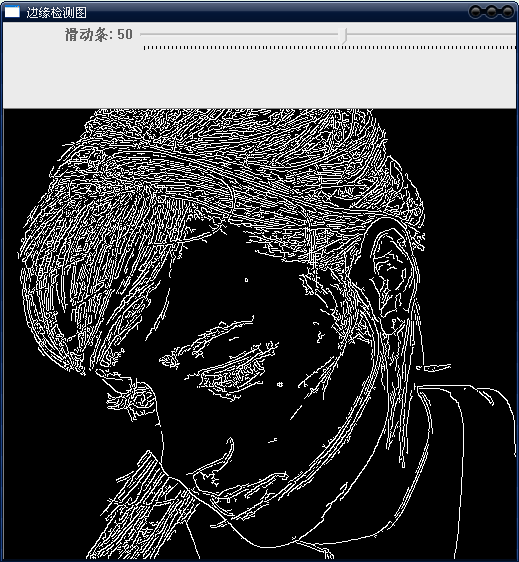
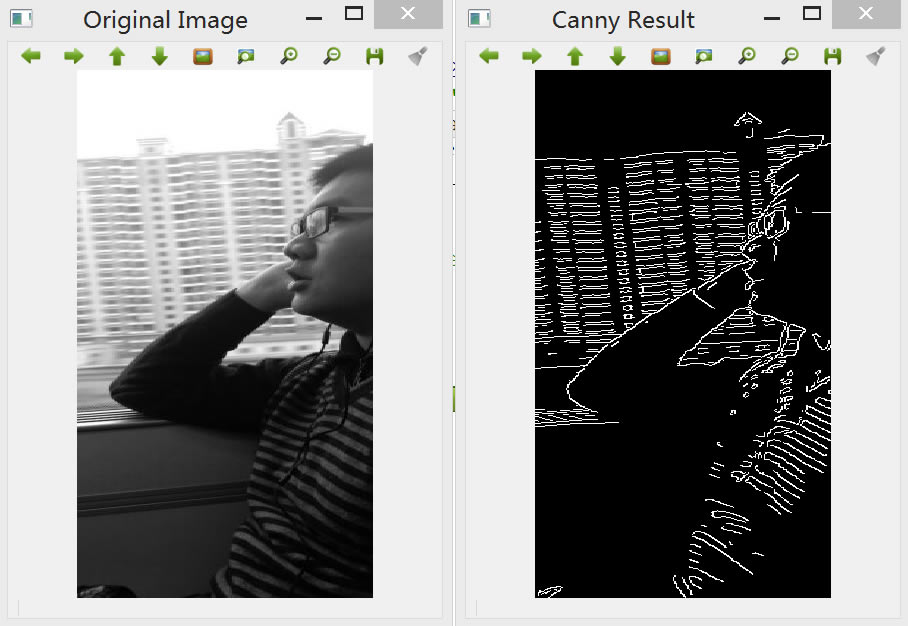
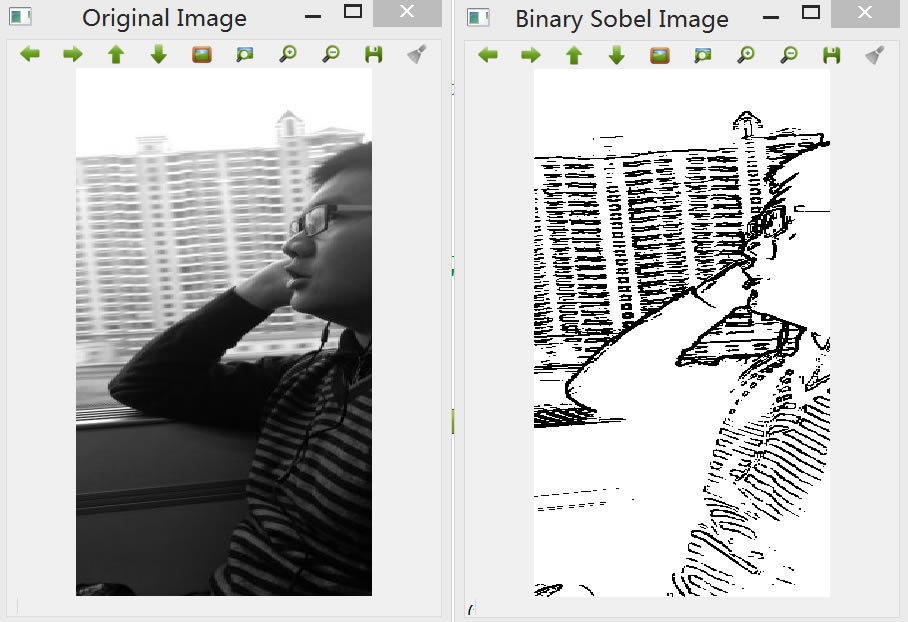
效果:
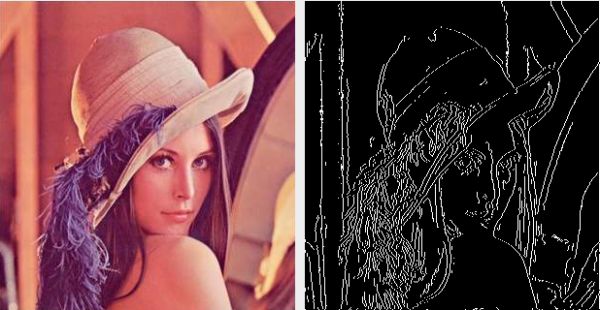
以下是Sobel运算符的输出效果:
与Sobel运算符相比canny算子边缘检测原理,Canny运算符可以获得更细的边缘,因为Canny算法使用其他策略来提高图像质量. 在使用滞后阈值之前canny算子边缘检测原理,应去除梯度大小不是最大值的所有边缘点. 这样,渐变的方向始终垂直于边缘,因此该方向上的局部渐变最大值对应于轮廓强度最高的点. Canny算法适用于不同场合. 其参数允许根据不同实现的特定要求进行调整,以识别不同的边缘特征. 此外,Canny算法包含许多可调参数,这将影响算法的计算时间和有效性. 高斯滤波器的大小: 第一步中使用的平滑滤波器将直接影响Canny算法的结果. 较小的滤镜也会产生较少的模糊,因此可以检测到变化较小的细线. 较大的滤镜也会产生更多的模糊效果. 将图像的较大区域绘制为特定点的颜色值. 这样的结果对于检测较大的平滑边缘(例如彩虹边缘)更有用. 阈值: 使用两个阈值比使用一个阈值更灵活,但是阈值仍然存在一些常见问题. 如果阈值设置得太高,可能会丢失重要信息;如果阈值太低,则分支信息将被认为是重要的. 很难给出适用于所有图像的通用阈值. 当前没有经过验证的实现方法.
|
温馨提示:喜欢本站的话,请收藏一下本站!
本站发布的Win7纯净版系统、Win10纯净版和XP纯净版系统仅为个人学习测试使用,请在下载后24小时内删除,不得用于任何商业用途,否则后果自负,请支持购买微软正版软件!
本站所有资源全部来自于网络资源,如侵犯到您的权益,请及时通知我们(),我们会及时处理.
Copyright © 2018-2020 萝卜系统 手机站 关于本站