|
根据运行的环境,操作系统可以分为桌面操作系统,手机操作系统,服务器操作系统,嵌入式操作系统等。
光电工程,2011年5月5日,第38卷,文章ID: 1003-501X(2011)05-0127-06自适应阈值Canny边缘检测算法四川大学电子信息学院,光电系,成都610065;中国科学院光电技术研究所,成都610209摘要: 针对传统Canny算法的阈值选择困难,本文提出了一种基于最大类间方差法的高低阈值自适应同步搜索方法. 该方法首先根据梯度直方图信息将相应像素分为三类;其次,基于改进的Otsu算法定义了一个评估函数,描述了类之间的差异. 最后依次搜索评估函数的最大值,以自动获得Canny计算孩子的高低阈值. 此方法不需要手动设置任何参数. 与传统的Canny算法和直接Otsu算法相比,该方法可以更好地提取不同图像的真实边缘,特别是在低对比度图像边缘提取中,该方法具有更多的优势. 关键词: 边缘检测Canny算法;改进的Otsu算法;自适应阈值CLC号: TP391.41文档代码: A DOI: 10.3969 / j.issn.1003-501X.2011.05.023改进算法CannyEdge检测中国;中国科学院电子学研究所,成都610209阈值选择Cannyalgorithm,同时自适应地改进了基于Otsualgorithm阈值的方法. 首先,这三个类别都是梯度梯度直方图测试图像. 其次,基于改进的Otsu算法,评估函数在三类之间的均方误差. 最后,两个低阈值都自适应地选择了最大值评估函数. 人工参数设置方法. 与传统Canny方法DirectOtsu方法的结果进行比较,该方法显示了来自不同图像(尤其是低对比度图像)的巨大优势. 关键字: 边缘检测; Canny算法;改进的Otsu算法;自适应阈值随着当前数字信息技术的发展,数字图像处理技术变得越来越重要,特别是在光电检测领域得到广泛应用,其主要内容之一就是实现对地图的精确定位.
当前的边缘检测方法是计算图像的某个特征值(渐变或灰度),然后根据给定的特征值控制阈值Sobel,Prewitt,Robert,Log,Canny [1- 2]等等,对于特定图像,它们已经获得了良好的边缘检测结果,但是由于其自身的局限性,对于某些图像,它们无法获得令人满意的结果. 近年来,在这些传统方法的基础上,开发了一系列新的边缘检测方法,例如表面拟合方法,神经网络和数学形态学方法,自适应平滑滤波方法,小波变量接收日期: 2010-10- 15;收到稿件的修订日期: 2011-02-22基金项目: “西方之光”项目作者简介: 唐麓路(1986-),女(汉族),重庆人. 硕士生,主要的研究工作是三维光电技术. 电子邮件: tanglulubbb@163.com. 变更方法. 在许多图像边缘检测方法中,Canny运算符因其严格的边缘检测评估标准而被广泛使用. 但是,传统Canny算子的高低阈值之比是固定和手动确定的,这导致它在某些应用领域中失败. 实际上,光,杂散光和各种其他噪声容易干扰图像. 记录图像的对比度高低,噪点程度也不同. 在这些情况下,如果仍然使用传统的Canny算子进行边缘检测,则很难确定高阈值和低阈值. 另一方面改进的自适应阈值canny边缘检测,对不同的图像使用相同的阈值比率可能会导致边缘信息丢失或虚假边缘.
鉴于确定传统Canny算子阈值的难度,已提出了各种解决方案. 例如,在梯度差直方图中,找到合适的零交叉位置作为高阈值,然后使用该高阈值乘以比例因子(例如0.5)作为低阈值;使用Otsu算法确定Canny运算符的高阈值,然后使用该高阈值将阈值乘以比例因子作为其低阈值;在梯度直方图中,将与最大像素数对应的梯度值作为标准梯度进行搜索,计算出整个区间的标准偏差,最后将标准梯度加上整个区间的标准偏差作为Canny操作员的高门槛. 确定高阈值后,在梯度直方图中忽略高阈值后的梯度和像素,并对剩余的梯度和像素重复上述操作,即剩余间隔的标准偏差加原始标准梯度用作Canny运算符下限阈值;有一些基于数学统计的方法,通过定义概率的评估函数来确定高低阈值[6-7]. 这些方法在一定程度上解决了Canny算子阈值确定的问题. 提出了一种基于最大类间方差的高低阈值自适应同步搜索方法. 该方法比传统方法更具适应性. 它不需要手动设置任何参数. 它根据图像本身的特征自动选择高和低阈值,高和低阈值的确定彼此无关. 通过从多个不同的图像中提取边缘,结果表明该方法比传统方法能更好地提取真实边缘.
同时,将实验与直接应用于Canny算法的Wen Otsu方法进行了比较. 结果表明,该方法可以更有效地提取图像边缘. Canny算法简介Canny算法提出了三种严格的边缘检测标准: (a)良好的信噪比; (b)定位精度高; (c)单边反应. 根据这三个标准,Canny推导了最佳边缘检测算子的近似实现,即边界点位于梯度幅度最大点附近的邻域的一阶偏导数的有限差分处. 通过高斯函数对图像进行平滑处理,然后计算出平滑度. 在后图像方向的偏导数之后,使用第二范数来计算梯度幅度M,并且梯度方向对梯度幅度执行非最大抑制以确定候选边缘点. 在梯度幅度图中,如果某个点的梯度值与该点的梯度方向上两个相邻像素的梯度值相比不是最大,则将该点视为非边缘点并删除. 将抑制后获得的候选边缘点记录在全局阈值上,并选择边缘点. 在梯度幅度图的直方图分布中,像素的数量在梯度幅度增加的方向上累积. 当累加数达到总数的某个比例(例如80%)时,将相应的梯度值用作高阈值,一半或高阈值. 低阈值为40%. 在图边缘的候选边缘点中,梯度值大于高阈值的点被保留为边,梯度值小于低阈值的点被删除,而梯度值在两者之间的点被删除保留两个与边缘点相邻的阈值作为边缘,否则将其删除. 然后确定在保留点的八个方向上是否有大于高阈值的边缘像素. 如果存在,则将其视为边缘点. 否则,它不是Canny算法过程. 可以看出,阈值的选择是图像边缘提取的关键.
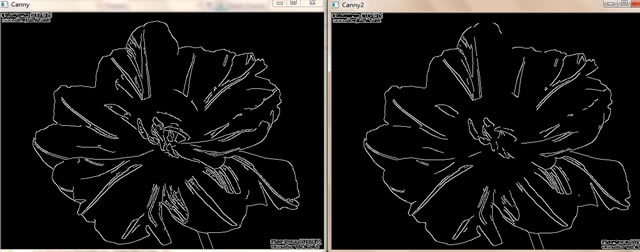
传统的Canny操作员要求人类预先设定高和低阈值,这需要先验经验,并且可能会重复多次以找到合适的阈值. 将阈值设置得太高可能导致边缘断裂等: 自适应阈值Canny边缘检测算法129不连续,从而丢失了边缘信息. 将阈值设置得太低可能会导致提取的边缘中出现过多的虚假边缘,甚至使用噪声作为边缘提取. 另内最小化差异[11]. Otsu算法的启示. 针对传统Canny算子难以确定阈值的问题,提出一种基于梯度幅度直方图和类间最大方差的自动阈值选择方法. 令图像中的总像素为N,并且灰度范围由[0,之间的像素组成. 然后将背景和目标的平均灰度值分别表示为Ostu算法,并将其作为Ostu算法的最佳阈值. Ostu算法实际上使用最小错分概率作为分割阈值的选择标准[12] Otsu算法的启示是,在对Canny算子进行非极端抑制后,可以将边缘图中的像素划分为三个类别. 其中,素数表示原始图像中的边缘点. 假设原始图像中的像素总数为N,并且灰度梯度是类别内的梯度幅度,则期望为(10)(12)并定义: 然后,可以定义64个级别的评估函数. 因此,上面的公式是一个二进制二次函数,k取[1,l]之间的值,m取[k + 1,l]之间的值[k,m]描述类之间的方差,并使之间的方差最大化从数学统计的角度来看,类是区分类的最佳标准之一. 因此,您可以搜索Canny运算符的高低阈值. 自适应阈值Canny算法的流程图如下. 选择. Canny算法的阈值流程图. 图1流程图Cannyalgorithm自适应阈值MATLAB7.8.0(R2009a)为实验平台选择不同的图像,并使用传统的Canny算法(高低阈值比例系数统一为0.8、0.5,高斯参数统一为1),文献Otsu本文将其直接应用于Canny算法(使用Otsu算法确定的阈值作为Canny的高阈值,而高阈值是Canny的低阈值的0.5倍)和自适应阈值Canny算法用于边缘检测分析. 图中第一行是对比度较低的蔬菜和水果图;第二行是经典的莉娜地图;第三行是复杂的电路板图;第四行是具有丰富边缘信息的龙图. 实验结果以最大值表示. 定义评估函数计算期望类别边缘跟踪滞后双阈值非最大抑制分像素3查找梯度高斯滤波器平滑输入源图像等: 自适应阈值Canny边缘检测算法131 Canny边缘检测结果第一列是原始图像;第二列是传统Canny算法的边缘检测结果. 第三列是直接在Canny算法中应用的Otsu算法的边缘检测结果. 第四栏是本文自适应Canny算法的边缘检测结果. 图2 Cannyedge检测行的原始图像;行经典Canny边缘检测;行Otsuthresholding方法Cannyoperator;行阈值自适应Canny边缘检测中的参数是使用不同方法时Canny算子的高阈值和低阈值,并且是归一化的灰度梯度幅度. 从以上实验结果可以看出,本文的自适应阈值Canny算法可以有效地提取图像边缘,比传统方法和直接确定Canny高阈值的两种方法具有更多的优势. 使用Otsu算法. 从图中可以看出,当使用前两种方法提取Lena边缘时,Lena的顶部,边缘和脸部的线条明显折断,但是使用此方法提取时,线条清晰且连续文章;同样,在此方法中应用了前两个方法,忽略了蔬菜图中青椒表面,电路图中间和龙的身体表面的一些明显边缘,并且此方法提取的边缘信息更加丰富,并且有效. 表实验参数低阈值Tk高阈值Tm阈值自适应高阈值和低阈值的方法首先根据梯度将相应的像素分为三类,其次基于改进的Otsu算法定义评估函数. 评估函数描述类别之间的方差改进的自适应阈值canny边缘检测,然后依次搜索以找到与最大评估函数值相对应的两个. 渐变,确定为Canny运算符的高低阈值. 整个算法过程不需要手动设置任何参数,而是根据图像本身的特征自动确定Canny算法的高低阈值. 这为传统Canny算法的阈值确定问题提供了更好的解决方案. 实验表明,该方法可以更好地提取不同图像的真实边缘,与传统的Canny算法和Otsu算法直接确定Canny的高阈值相比,具有更多的优势. 参考: 冈萨雷斯. 数字图像处理: 第二版北京: 电子工业出版社,2007: 463-491. 拉斐尔・冈萨雷斯(Rafael Gonzalez). 数字图像处理: 第二版北京: 电子工业出版社,2007: 463-491. 冈萨雷斯. 硅. 数字图像处理: MATLAB北京: 电子工业出版社,2005: 289-295. 拉斐尔・冈萨雷斯(Rafael Gonzalez). 使用: MATLAB进行数字图像处理北京: 电子工业出版社,2005: 289-295. 光电工程,2009,36(11): 106-111,117.罗涛,郑锡峰,丁铁夫. 改进的自适应阈值Canny边缘检测光电工程,2009,36(11): 106-111,117. 梅芳,岳光学,于庆仓. OtsuMethod CannyOperator [C] // ISIP'09,中国黄山,2009年8月21-23日: 109-112. 王智快速自适应阈值CannyEdge检测器SPIE(S0277-786X),2005,6044: 60441Q1-60441Q8. 自适应双阈值Canny算子用于图像边缘检测. 长春工程学院学报,2007,8(3): 44-46. 李瑜自适应二进制阈值CannyEdge检测长春研究所科技,2007,8(3): 44-46. 哈尔滨工程大学学报,2007,28(9): 1002-1007. 李牧自适应Canny算子边缘检测技术哈尔滨工程大学,2007,28(9): 1002-1007. 金刚. 来自自适应Canny算法的研究及其在图像边缘检测中的应用杭州: 浙江大学,2009: 22-24. 金刚AdaptiveCanny算法及其在图像边缘检测中的应用杭州: 浙江大学,2009: 22-24. 约翰・坎尼. ComputationalApproach EdgeDetection IEEETrans. 模式分析机器智能(S0162 -8828),1986,8(6): 679-698. [10] Otsu阈值选择方法,从灰度直方图IEEE Transactions system Man Cyber??netics(S1083-4419),1979,9(1): 62-66. [11]北京: 化学工业出版社,2002: 98-99. 唐良瑞,马全明. 应用技术图像处理北京: 化学工业出版社,2002: 98-99. [12]廖炳成. 快速算法多级别阈值信息科学工程(S1016- 2364),2001,17: 713-727.
|
温馨提示:喜欢本站的话,请收藏一下本站!
本站发布的Win7纯净版系统、Win10纯净版和XP纯净版系统仅为个人学习测试使用,请在下载后24小时内删除,不得用于任何商业用途,否则后果自负,请支持购买微软正版软件!
本站所有资源全部来自于网络资源,如侵犯到您的权益,请及时通知我们(),我们会及时处理.
Copyright © 2018-2020 萝卜系统 手机站 关于本站